近日,我校机械工程学院丁建宁教授、程广贵教授、胡兴好副教授等在《美国科学院院刊》(Proceedings of the National Academy of Sciences)上在线发表研究论文“Fast, variable stiffness-induced braided coiled artificial muscles”。best365英国体育在线为第一完成单位,胡兴好副教授为第一作者,硕士生王翔宇和硕士生王健为共同第一作者,通讯作者为胡兴好副教授、程广贵教授、丁建宁教授和德克萨斯大学达拉斯分校雷伊·鲍曼院士。
近年来,开发同时具备响应速度快、绝对输出功大的纤维人工肌肉对其在柔性可穿戴外骨骼等领域中的应用具有重要意义。加捻卷绕型人工肌肉具有媲美自然肌肉的性能而被广泛研究。然而由于加捻纤维的捻度从表面到其中心逐渐递减,处于中心部分的纤维对人工肌肉驱动性能的贡献甚微,这意味着在纤维中心的输入能量没有得到有效利用。有研究通过鞘-芯结构、中空结构来解决响应速度和能量效率问题。然而,这种中空结构需要较厚的壁厚来避免扭转引起的管塌陷,这增加了肌肉重量,减少了输出功。
为解决上述科学问题,近日,best365英国体育在线胡兴好副教授等提出编织包覆中空管构筑编织卷绕型人工肌肉的新方法,并提出变刚度的驱动理论。具体原理为:在气压作用下,中空管带动编织管直径膨胀,肌肉刚度随之增加,进而导致肌肉在拉伸负载下收缩,在压缩负载下伸长。该肌肉可在低气压下实现快速、大冲程和高频驱动。此外,由于其低成本、高性能和易于制造,编织卷绕型人工肌肉满足了当前机器人驱动应用的需求。最后,团队设计了三种机器人,包括爬行机器人、行走机器人和攀爬机器人,展示了其在智能机器人中的应用。爬行机器人可以达到22.5cm/s(2.25个身体长度/秒)的速度;行走机器人可以达到12.5cm/s的速度直线行走,也可以在14秒内以0.1cm-1的曲率转动方向,同时保持1.1cm/s的最大速度。
该项工作得到国家自然科学基金、中国博士后基金、中国科协青年人才托举工程和江苏省优秀青年基金等项目的资助。
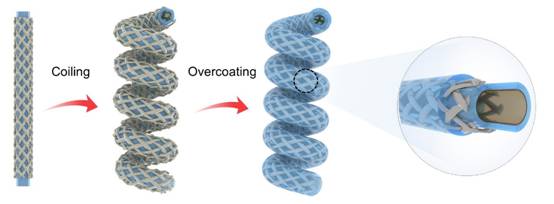
图1.编织卷绕型人工肌肉的制作流程

图2. 编织卷绕型人工肌肉的无泵驱动原理示意图
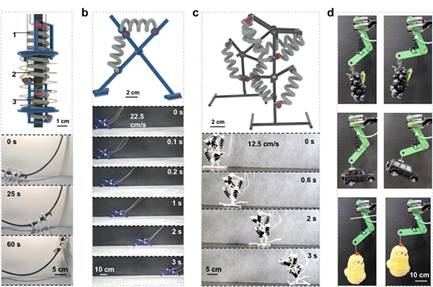
图3 编织卷绕型人工肌肉在机器人上的应用
文章链接:https://www.pnas.org/doi/10.1073/pnas.2412288121